Growing Robot
Vine-Inspired Soft Robot for Endoscopic and Cardiovascular Procedures
Development of innovative vine-inspired growing robots using eversion principles for endoscopic and cardiovascular medical applications, including TAVI procedures and minimally invasive interventions.
Growing Robot
Development of innovative vine-inspired growing robots using eversion principles for endoscopic and cardiovascular medical applications, including TAVI procedures and minimally invasive interventions.
Project Overview
The Growing Robot project represents a paradigm shift in medical robotics, developing vine-like soft robots that “grow” through complex anatomical pathways. These everted pneumatic structures navigate delicate environments by extending from their tip rather than sliding, minimizing friction and tissue trauma.
Tip Extension
Navigates by everting material from the tip, completely eliminating sliding friction against surrounding tissue.
Active Steering
Multi-chamber pneumatic steering allows precise navigation through complex bifurcating pathways.
Smart Materials
Variable stiffness capabilities adapt to the required mechanical properties of different anatomical regions.
Target Applications
- 🧠 Endovascular Surgery: Navigation through tortuous brain vasculature
- 🫁 Bronchoscopy: Reaching deep peripheral lung nodules
- 🦠 Gastroenterology: Exploring narrow intestinal strictures
- 👶 Pediatric Surgery: Navigating extremely confined infantile anatomies The technology has significant applications in cardiovascular interventions, particularly in Transcatheter Aortic Valve Implantation (TAVI) procedures.
Project Focus Areas:
- Eversion-based soft robotics
- 3D kinematics and quasi-static modeling
- Medical applications in cardiovascular surgery
- Material science for flexible robotic systems
- Minimally invasive surgical techniques
Key Innovation: Eversion Principle
Growing robots operate on a unique eversion mechanism where:
- Inflation: The robot body is pressurized with fluid or gas
- Eversion: Material at the tip unfolds and extends the robot’s length
- Navigation: The robot can traverse narrow and tortuous pathways
- Safety: Minimal contact forces reduce tissue damage risk
This approach enables deployment through complex anatomical structures while maintaining flexibility and safety.
Technical Approach
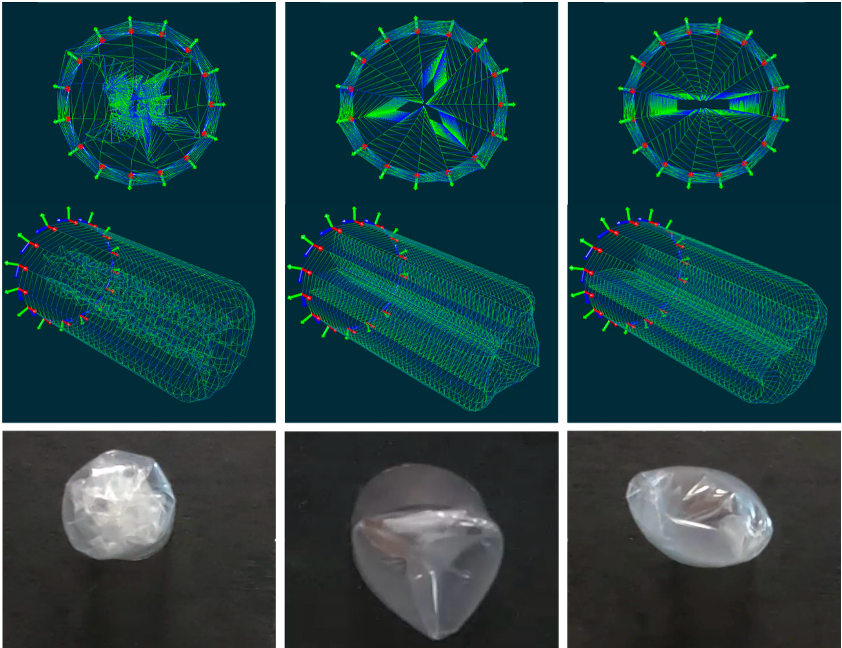
3D Kinematics Modeling
- Cosserat Rod Models: Used for local coordinate systems
- Complex Kinematic Simulation: Understanding eversion behavior
- Parameter Identification: Factors affecting eversion process
- External Response Analysis: Robot behavior under external forces
Quasi-Static Analysis
- Finite Element Methods: Advanced computational modeling
- Combined Modeling: Integration of kinematics and statics
- Tip Behavior Prediction: Understanding robot deployment
- SOFA Framework Implementation: Real-time simulation capabilities
Material Innovation
- Semi-Extensible Materials: Enhanced flexibility and compliance
- Silicone-Coated Ripstop Nylon: Base material for robot body
- Material Property Optimization: Compliance studies for various materials
- Biocompatible Solutions: Safe materials for medical applications
Medical Applications
TAVI (Transcatheter Aortic Valve Implantation)
Growing robots offer revolutionary advantages for TAVI procedures:
- Less Invasive Access: Deployment from inside cardiovascular system
- Patient-Specific Adaptation: Flexibility for unique anatomical morphologies
- Reduced Perforation Risk: Soft deployment mechanism
- Stenosis Navigation: Capability to traverse narrow anatomical areas
- Precision Positioning: Accurate valve placement
Other Medical Applications
- Endoscopic Procedures: Navigation through GI tract
- Vascular Interventions: Catheter-based treatments
- Surgical Inspection: Access to hard-to-reach anatomical areas
- Archaeological Applications: Non-medical exploration uses
- Industrial Inspection: Quality control in narrow spaces
Research Results and Achievements
Kinematic Understanding
- Successfully parameterized eversion starting conditions
- Identified critical factors affecting eversion process
- Developed predictive models for robot behavior
- Validated through SOFA framework simulations
Clinical Testing
- 8mm Diameter Prototype: Silicone-coated Ripstop Nylon construction
- Iodine Solution Pressurization: Biocompatible inflation medium
- Cadaveric Trials: Real anatomical testing environment
- Navigation Challenges: Identified stenosis traversal difficulties
Material Compliance Studies
- Explored various semi-extensible materials
- Enhanced robot flexibility for tight anatomical passages
- Improved navigation through stenotic areas
- Optimized material properties for specific applications
Publications
Conference Papers
“3D Kinematics and Quasi-Statics of a Growing Robot Eversion” (2023)
- Authors: Flavie Przybylski, Yinoussa Adagolodjo, Anna Mîra, Giulio Cerruti, Jérémie Dequidt, Christian Duriez, Pierre Berthet-Rayne
- Conference: 2023 IEEE International Conference on Soft Robotics (RoboSoft)
- DOI: 10.1109/RoboSoft55895.2023.10122073
- HAL ID: hal-04390298
- Focus: Computational modeling of eversion kinematics and robot tip behavior
“Enhancing TAVI Robot Flexibility Using Semi-Extensible Materials” (2024)
- Authors: Flavie Przybylski, Yinoussa Adagolodjo, Jérémie Dequidt, Christian Duriez, Pierre Berthet-Rayne
- Conference: HSMR 2024 - 16th Hamlyn Symposium on Medical Robotics
- HAL ID: hal-04646160
- Focus: Material science applications for improved TAVI robot performance
Technical Specifications
Robot Characteristics
- Diameter: 8mm (current prototype)
- Material: Silicone-coated Ripstop Nylon
- Pressurization: Iodine solution (biocompatible)
- Deployment Method: Internal eversion mechanism
- Navigation: Suitable for tortuous anatomical pathways
Modeling Framework
- Simulation Platform: SOFA (Simulation Open Framework Architecture)
- Kinematic Model: Cosserat rod theory
- Static Analysis: Finite element methods
- Integration: Combined kinematic-static modeling approach
Applications Scope
- Primary: TAVI cardiovascular procedures
- Secondary: General endoscopic applications
- Research: Archaeological and industrial inspection
- Testing: Narrow passage navigation scenarios
Future Developments
Enhanced Materials
- Advanced Compliance: New semi-extensible material formulations
- Biocompatibility: Improved materials for extended body contact
- Durability: Enhanced material strength and reusability
- Smart Materials: Responsive materials for adaptive behavior
Advanced Control
- Autonomous Navigation: AI-guided pathway selection
- Force Sensing: Real-time tissue interaction monitoring
- Adaptive Deployment: Variable eversion based on anatomy
- Multi-DOF Control: Enhanced maneuverability
Clinical Translation
- Human Trials: Progression from cadaveric to clinical studies
- Regulatory Approval: FDA/CE marking for medical use
- Surgical Integration: OR workflow optimization
- Training Programs: Surgeon education and certification
Expanded Applications
- Neurovascular Access: Brain intervention applications
- Pediatric Medicine: Smaller diameter variants
- Emergency Medicine: Rapid deployment scenarios
- Combination Devices: Integration with imaging and therapy
Collaborative Research
Academic Partnerships
- University research collaborations in soft robotics
- Medical school partnerships for clinical validation
- International conferences and symposiums
- Cross-disciplinary research initiatives
Industry Collaboration
- Medical device manufacturers
- Material science companies
- Simulation software developers
- Healthcare technology integrators
Clinical Partnerships
- Cardiovascular surgery departments
- Interventional cardiology teams
- Medical device testing facilities
- Clinical trial coordination centers
Impact and Significance
Healthcare Innovation
- Reduced Invasiveness: Minimizing patient trauma
- Improved Outcomes: Enhanced precision and safety
- Accessibility: Procedures for high-risk patients
- Cost Reduction: Potential for outpatient procedures
Scientific Advancement
- Soft Robotics: Advancing eversion-based robotics
- Computational Modeling: Novel kinematic approaches
- Material Science: New biocompatible materials
- Medical Technology: Next-generation surgical tools
Global Health Impact
- Aging Population: Addressing demographic health challenges
- Cardiovascular Disease: Improving treatment options
- Healthcare Access: Enabling less invasive procedures
- Training Reduction: Simplified surgical techniques
Project Timeline
- 2023: Project initiation, concept development and early kinematic modeling
- 2024: RoboSoft publication and advanced eversion modeling
- 2025: Material studies and Hamlyn Symposium presentation
- Ongoing: Clinical validation and technology refinement
- Future: Regulatory approval and clinical implementation
Contact
For more information about the Growing Robot project, collaboration opportunities, or technical details about eversion-based robotics, please contact me.
Related Projects
- Active Prostate Phantom - Medical simulation and training
- IRE Project - Soft robotic endoscopes and digital twins
- ROBOCOP Project - Medical robotics for cochlear implants