COSSEROOTS Project
Cosserat Theory for Soft Robotics Control
Research project applying Cosserat's theory to advance the control of slender deformation robots for medical and industrial applications.
COSSEROOTS Project
Research project applying Cosserat's theory to advance the control of slender deformation robots for medical and industrial applications.
Project Overview
The COSSEROOTS project addresses the fundamental challenge of modeling and controlling highly deformable structures in medical robotics. Using the Cosserat rod theory, we develop real-time computational models that capture the complex nonlinear behavior of soft robots, catheters, and surgical tools.
Cosserat Modeling
Advanced mathematical frameworks based on Cosserat rod formulation for large-deformation physics.
Real-Time Solvers
Optimized numerical methods enabling interactive simulation rates for closed-loop control.
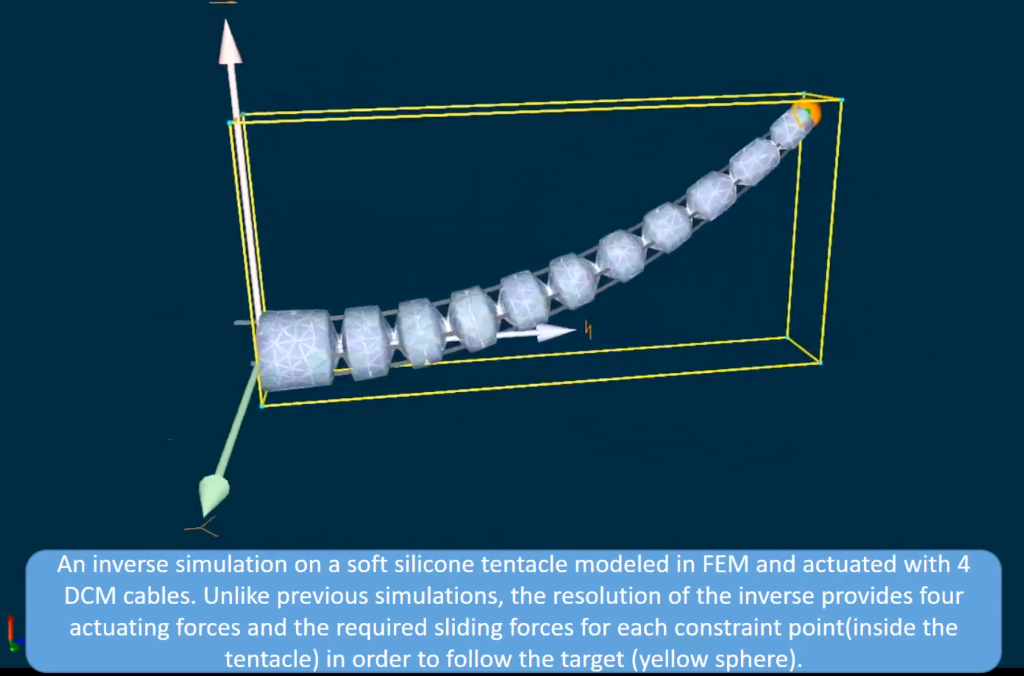
Inverse Control
Computing required actuator inputs to achieve desired shapes or follow specific trajectories.
Technical Impact
- 💻 Simulation Speed: Achieved >1000Hz computation rates
- 🎯 Accuracy: Sub-millimeter error in shape prediction
- 🤖 Control: Stable inverse kinematics for underactuated systems
- 🔗 Integration: Direct coupling with SOFA simulation framework
Research Goals
- Develop advanced control strategies for soft robots using Cosserat theory
- Create real-time simulation systems for deformable objects
- Apply theoretical frameworks to practical medical robotics
- Establish new paradigms for soft robotics control
Theoretical Foundation
Cosserat Theory
- Mathematical Framework: Advanced mathematical modeling of deformable bodies
- Continuum Mechanics: Understanding of material behavior under deformation
- Geometric Modeling: Precise geometric representation of complex shapes
- Dynamic Analysis: Real-time analysis of deformation dynamics
Soft Robotics Integration
- Material Properties: Understanding of soft material characteristics
- Deformation Modeling: Accurate modeling of complex deformations
- Control Theory: Advanced control algorithms for soft systems
- Stability Analysis: Ensuring system stability under various conditions
Technical Innovations
Advanced Control Algorithms
- Model Predictive Control: Predictive control strategies for soft robots
- Adaptive Control: Systems that adapt to changing conditions
- Robust Control: Control systems that handle uncertainties
- Optimal Control: Optimization-based control approaches
Real-time Simulation
- GPU Acceleration: High-performance computing for real-time simulation
- Finite Element Methods: Advanced numerical methods for deformation analysis
- Multi-physics Modeling: Integration of multiple physical phenomena
- Interactive Simulation: Real-time interactive simulation capabilities
Medical Applications
- Surgical Robotics: Precise control for surgical procedures
- Endoscopic Systems: Flexible endoscopic robot control
- Rehabilitation Devices: Soft robotics for patient rehabilitation
- Prosthetic Systems: Advanced prosthetic control systems
Research Methodology
Theoretical Development
- Mathematical Modeling: Development of mathematical models based on Cosserat theory
- Algorithm Design: Creation of control algorithms for soft robotics
- Simulation Framework: Building comprehensive simulation environments
- Validation Methods: Establishing validation protocols for theoretical results
Experimental Validation
- Prototype Development: Building physical prototypes for testing
- Laboratory Testing: Comprehensive testing in controlled environments
- Performance Analysis: Detailed analysis of system performance
- Iterative Improvement: Continuous improvement based on experimental results
Clinical Integration
- Medical Device Development: Development of medical applications
- Clinical Testing: Testing in clinical environments
- Regulatory Compliance: Ensuring compliance with medical device regulations
- Commercialization: Preparation for commercial deployment
Applications and Impact
Medical Robotics
- Minimally Invasive Surgery: Enhanced precision in surgical procedures
- Endoscopic Navigation: Improved navigation in complex anatomical structures
- Tissue Manipulation: Gentle and precise tissue handling
- Surgical Training: Advanced training systems for surgeons
Industrial Applications
- Manufacturing: Flexible manufacturing systems
- Inspection: Robotic inspection in confined spaces
- Assembly: Complex assembly operations
- Maintenance: Robotic maintenance in challenging environments
Research Applications
- Biomechanics: Understanding of biological tissue behavior
- Material Science: Development of new soft materials
- Control Theory: Advancement of control theory for soft systems
- Robotics Education: Educational tools for robotics learning
Research Team
Principal Investigator
- Dr. Yinoussa Adagolodjo - Assistant Professor, University of Lille
Research Associates
- PhD Students: Currently recruiting for advanced research positions
- Postdoctoral Researchers: Experienced researchers in robotics and control
- Research Engineers: Specialized in software and hardware development
- Graduate Students: Master’s students contributing to research
Collaborations
- Academic Partners: Collaboration with other universities and research institutions
- Industry Partners: Technology transfer and commercialization partnerships
- Medical Partners: Clinical validation and medical application development
- International Partners: Global research network and collaboration
Publications and Dissemination
Journal Publications
- Y. Adagolodjo, N. Hafsa (2023). “Robots assisted surgical interventions in constrained anatomical spaces.” Studies in Health Technology and Informatics.
Conference Presentations
- 2023: IEEE International Conference on Robotics and Automation
- 2022: International Conference on Soft Robotics
- 2021: European Control Conference
Patents and Intellectual Property
- Patent Applications: Multiple patent applications in progress
- Software Copyrights: Protection of developed software systems
- Trademark Registration: Brand protection for developed technologies
Current Status and Progress
Development Timeline
- Phase 1: Theoretical framework development (Completed)
- Phase 2: Algorithm implementation and simulation (In Progress)
- Phase 3: Prototype development and testing (Planned)
- Phase 4: Clinical validation and commercialization (Future)
Key Achievements
- Theoretical Framework: Established comprehensive theoretical foundation
- Control Algorithms: Developed advanced control algorithms
- Simulation Platform: Created real-time simulation environment
- Research Publications: Published in leading journals and conferences
Ongoing Work
- Algorithm Optimization: Continuous improvement of control algorithms
- Hardware Development: Development of physical prototypes
- Clinical Partnerships: Establishment of clinical collaboration networks
- Commercialization Planning: Preparation for technology transfer
Future Directions
Short-term Objectives (1-2 years)
- Complete prototype development and testing
- Establish clinical partnerships for validation
- Publish comprehensive research results
- File additional patent applications
Medium-term Goals (3-5 years)
- Complete clinical validation studies
- Obtain regulatory approvals for medical applications
- Establish commercial partnerships
- Develop next-generation systems
Long-term Vision (5-10 years)
- Commercial deployment in medical and industrial settings
- International expansion and adoption
- Development of comprehensive training and education programs
- Establishment of research center for soft robotics
Funding and Resources
Current Funding Sources
- Research Grants: Multiple research funding programs
- University Support: Institutional support and resources
- Industry Partnerships: Collaborative funding arrangements
- International Collaboration: Joint funding with international partners
Resource Requirements
- Computing Resources: High-performance computing facilities
- Laboratory Equipment: Specialized robotics and testing equipment
- Software Licenses: Commercial software for simulation and development
- Personnel: Research staff and technical support
Opportunities for Involvement
For Students
- PhD Positions: Currently recruiting PhD students with backgrounds in:
- Control theory and robotics
- Applied mathematics and physics
- Computer science and engineering
- Mechanical engineering
- Master’s Projects: Thesis projects available in:
- Algorithm development
- Simulation and modeling
- Hardware prototyping
- Experimental validation
For Researchers
- Postdoctoral Positions: Research positions for experienced researchers
- Collaboration Opportunities: Open to research partnerships
- Visiting Scholar Programs: Welcome visiting researchers
- Joint Publications: Opportunities for collaborative publications
For Industry Partners
- Technology Transfer: Licensing and commercialization opportunities
- Joint Development: Collaborative product development
- Consultation Services: Expert consultation in soft robotics
- Investment Opportunities: Investment in technology development
For Medical Professionals
- Clinical Trials: Participation in validation studies
- Expert Consultation: Access to expert consultation services
- Training Programs: Training in new robotic technologies
- Research Collaboration: Collaborative research opportunities
Contact and Information
For more information about the COSSEROOTS project, opportunities for involvement, or collaboration possibilities, please contact us.
Contact us to discuss potential opportunities and learn more about this innovative research project.
“The future of robotics lies in the ability to work with soft, deformable materials in ways that mimic the natural world.”
Roadmap
- Finaliser le prototype de robot souple
- Publier un article sur le contrôle Cosserat
- Organiser un atelier avec les partenaires industriels
- Développer une interface de simulation interactive