CONECT Project
Control of Needle Insertion in Robotic Surgery
The CONECT project focuses on developing innovative solutions for robotic needle insertion procedures, combining real-time simulation with augmented reality guidance for enhanced surgical precision.
CONECT Project
The CONECT project focuses on developing innovative solutions for robotic needle insertion procedures, combining real-time simulation with augmented reality guidance for enhanced surgical precision.
Project Overview
The CONECT project brought together researchers from leading institutions to develop innovative solutions for robotic needle insertion procedures. By combining real-time simulation with augmented reality guidance, the project aimed to enhance surgical precision and reduce complications during minimally invasive interventions.
Real-time Simulation
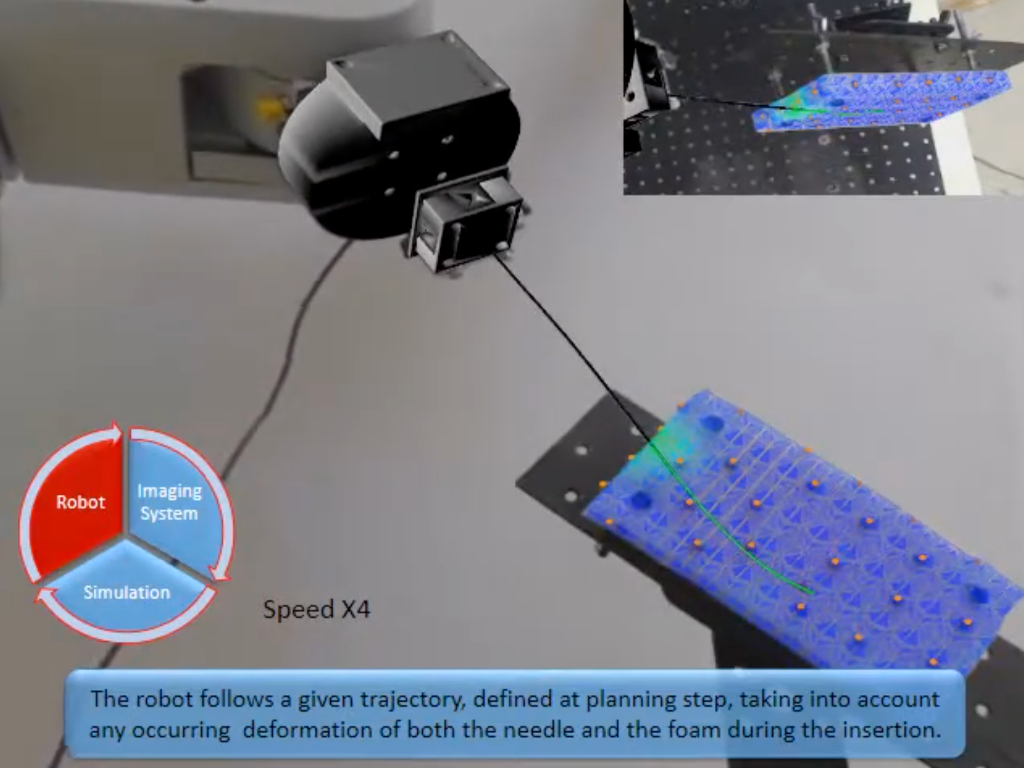
Advanced FEM algorithms for interactive soft tissue modeling and GPU-accelerated computation.
Robotic Control
Precise needle manipulation with force feedback integration and automated path planning.
Augmented Reality
Real-time surgical guidance with 3D visualization of internal structures and interactive planning.
Clinical Applications
- 🏥 Minimally invasive surgery: Enhanced accuracy
- 🔬 Biopsy procedures: Targeted tissue sampling
- 💊 Targeted drug delivery: Precision treatment
- ☢️ Interventional radiology: Advanced guidance
Publications
Key Papers
- Y. Adagolodjo, L. Goffin, M. De Mathelin, H. Courtecuisse (2019). “Constraint-based manipulation of deformable models in robotic surgery.” IEEE Robotics and Automation Letters.
Team Members
- Principal Investigator: Dr. Yinoussa Adagolodjo
- Research Engineers
- PhD Students
- Clinical Partners
Contact us for more information about this project.
Roadmap
- Intégrer la réalité augmentée au prototype
- Tester la précision de l’insertion d’aiguille
- Rédiger un rapport de validation clinique
- Déployer le système en salle d’opération simulée